Iron Fork is the first group project I was able to carry out during my studies at Ecole Centrale de Lille.
With a team of 11 other students, we designed a 3D printable open source robotic arm to help people with disabilities to eat independently. In addition to the social issue, which I liked right away, the development is in the "maker" spirit by being OpenSource, a spirit that I personally share.
This project was done in partnership with the I.E.M Christian Dabbadie, located in Villeneuve d'Ascq.
I was project manager, which allowed me to manage the team, to be in direct contact with the project's stakeholders, to organise the project as a whole by drawing up the Gantt schedule, and to participate in the various clusters.
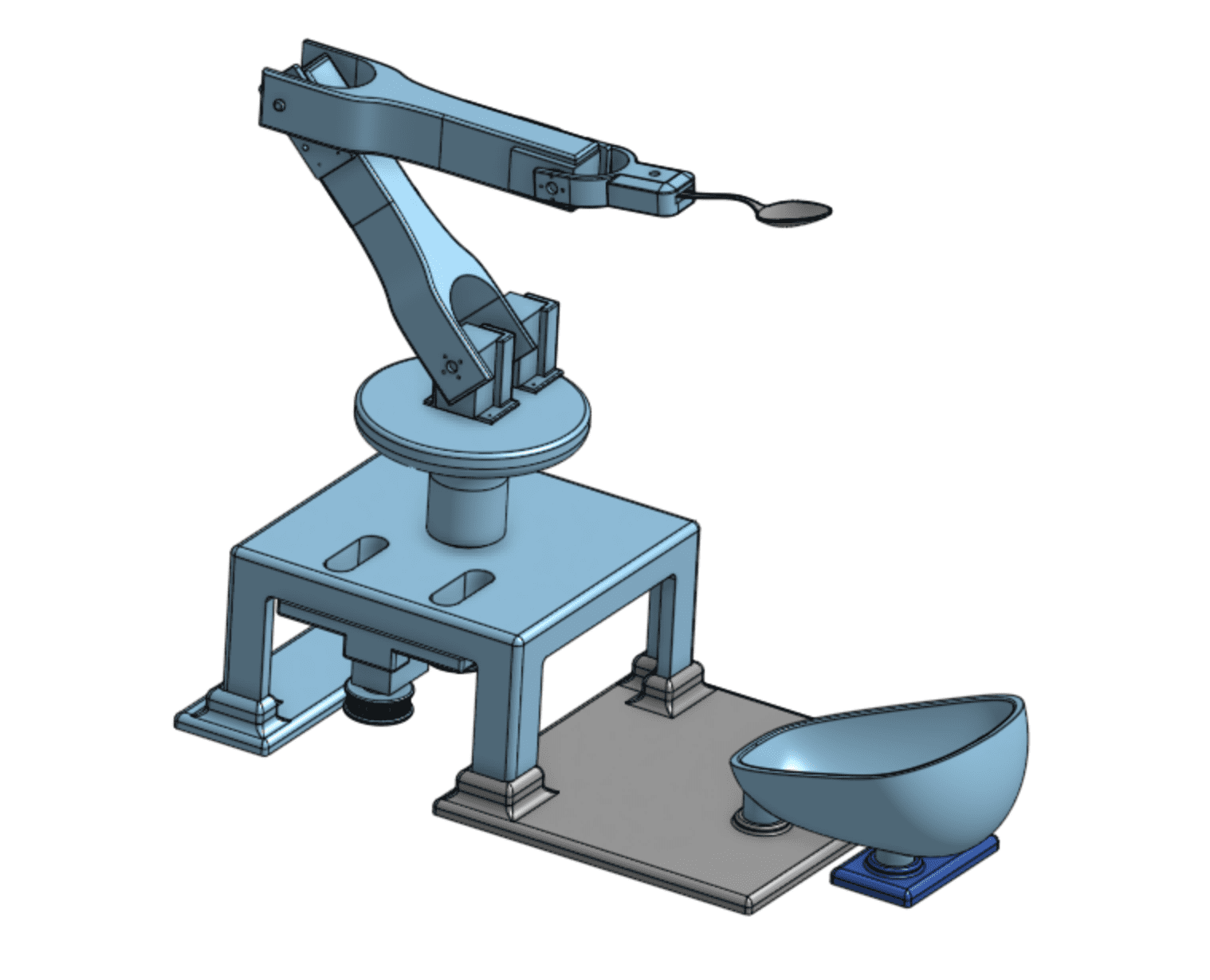
3D modelling
3D printing of the parts
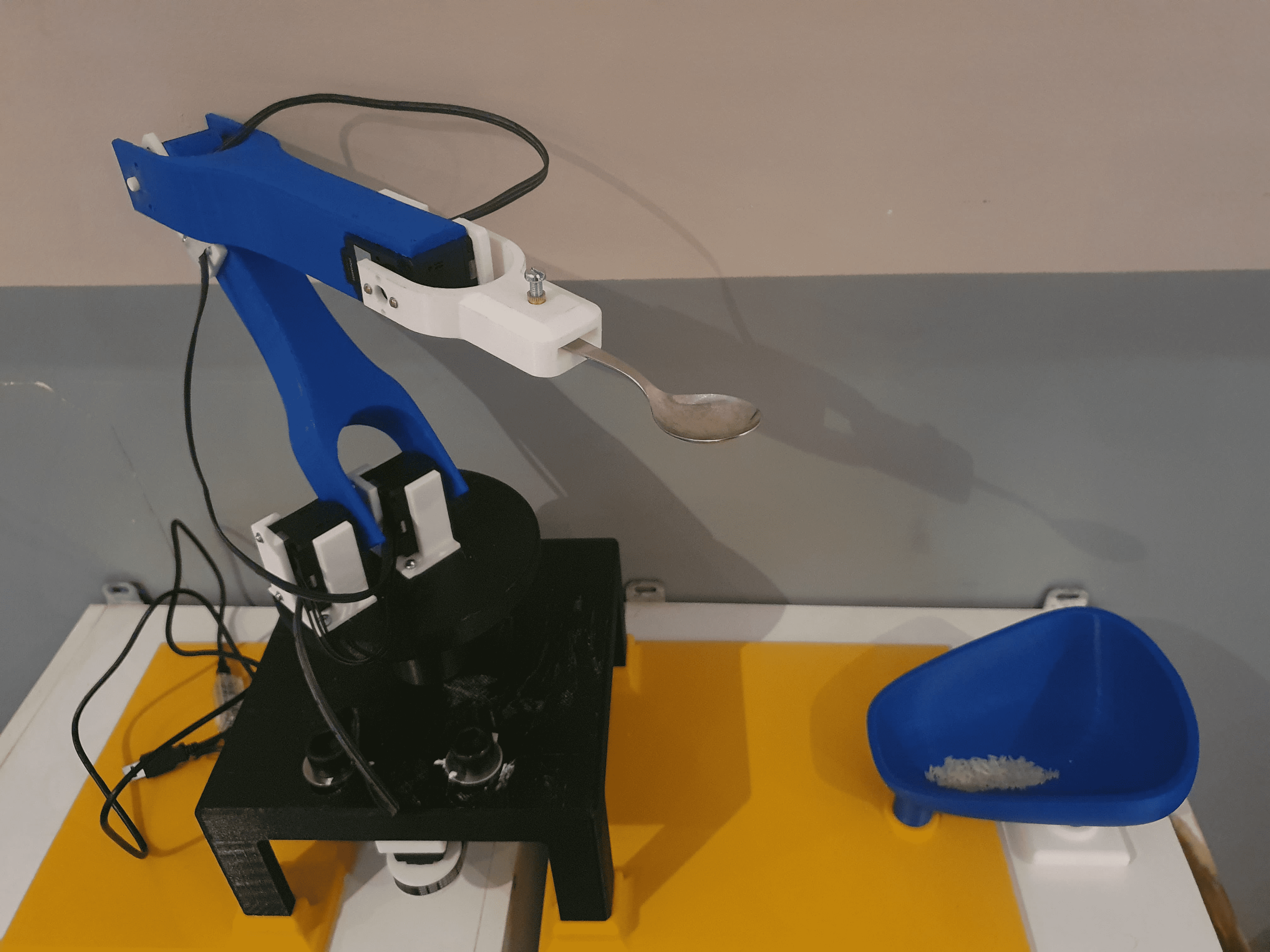
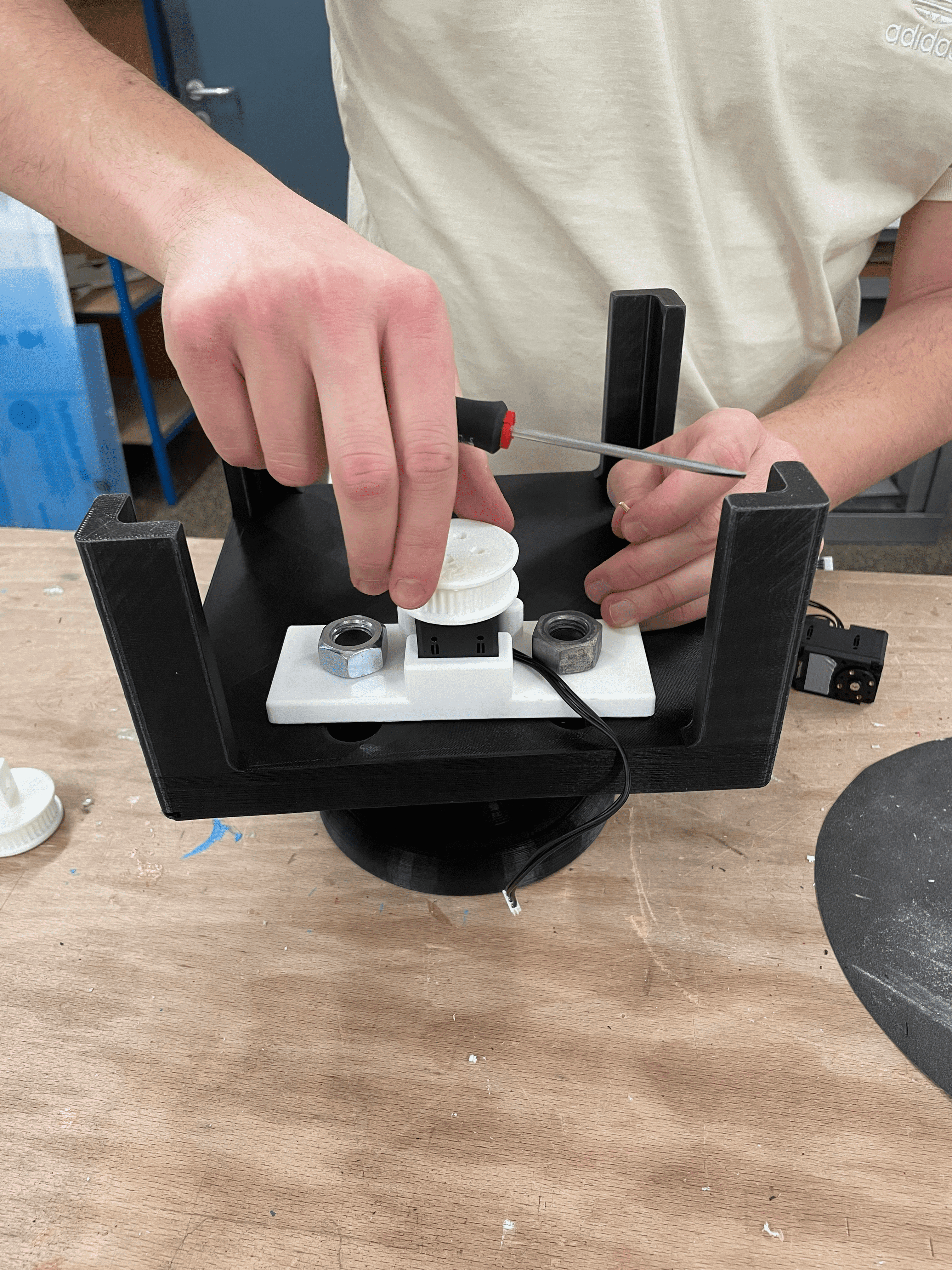
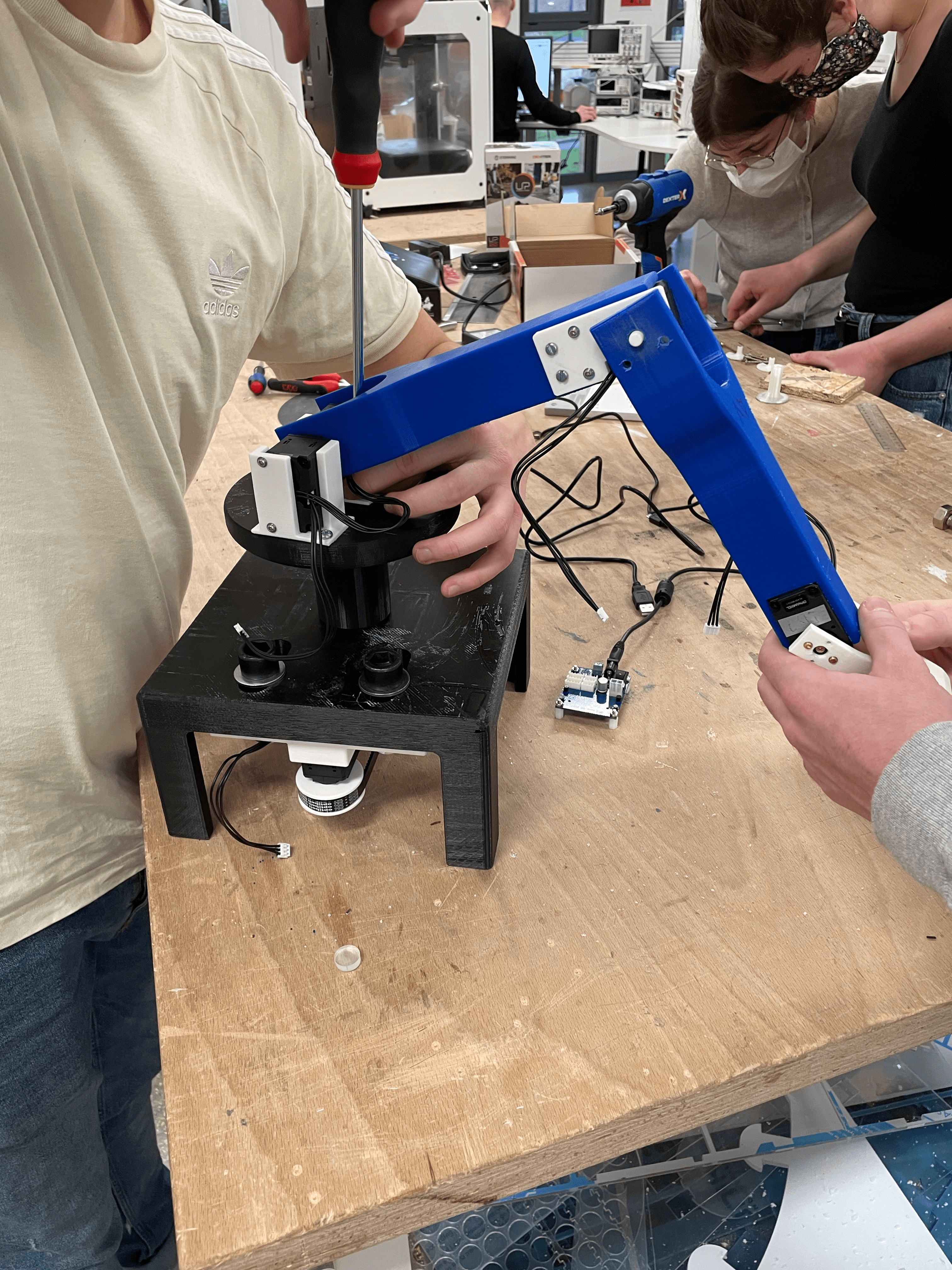
Building the prototype
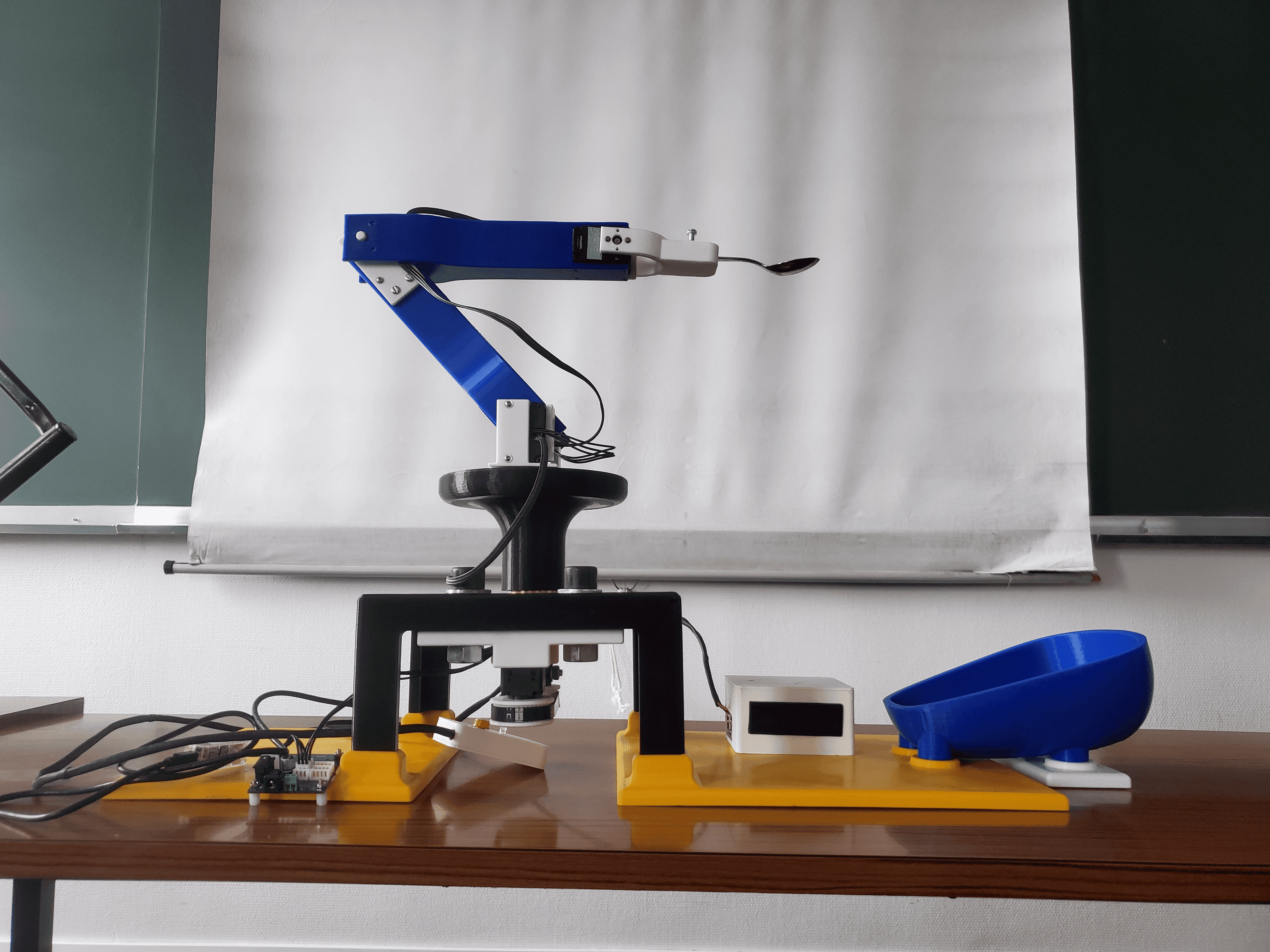
The final prototype
You can find all the information about the project, to build your robot or to continue the project, on the dedicated website: ironfork.fr
Electric Skateboard
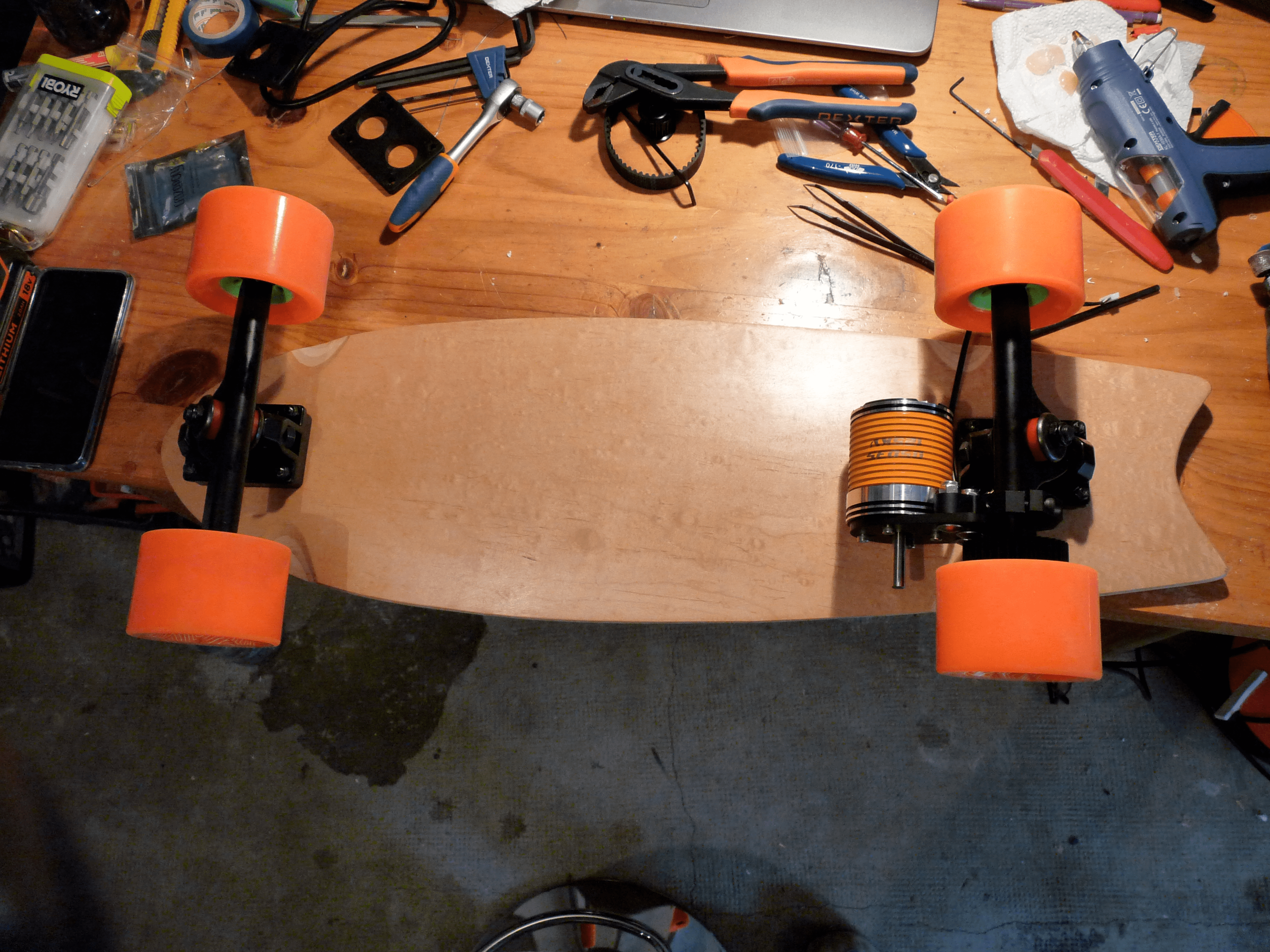
First prototype
Date : 2019
Charateristics
Dimensions : 71 x 27,5 cm
Top Speed: 40kph
Range: 25km
Weight: 6.4kg
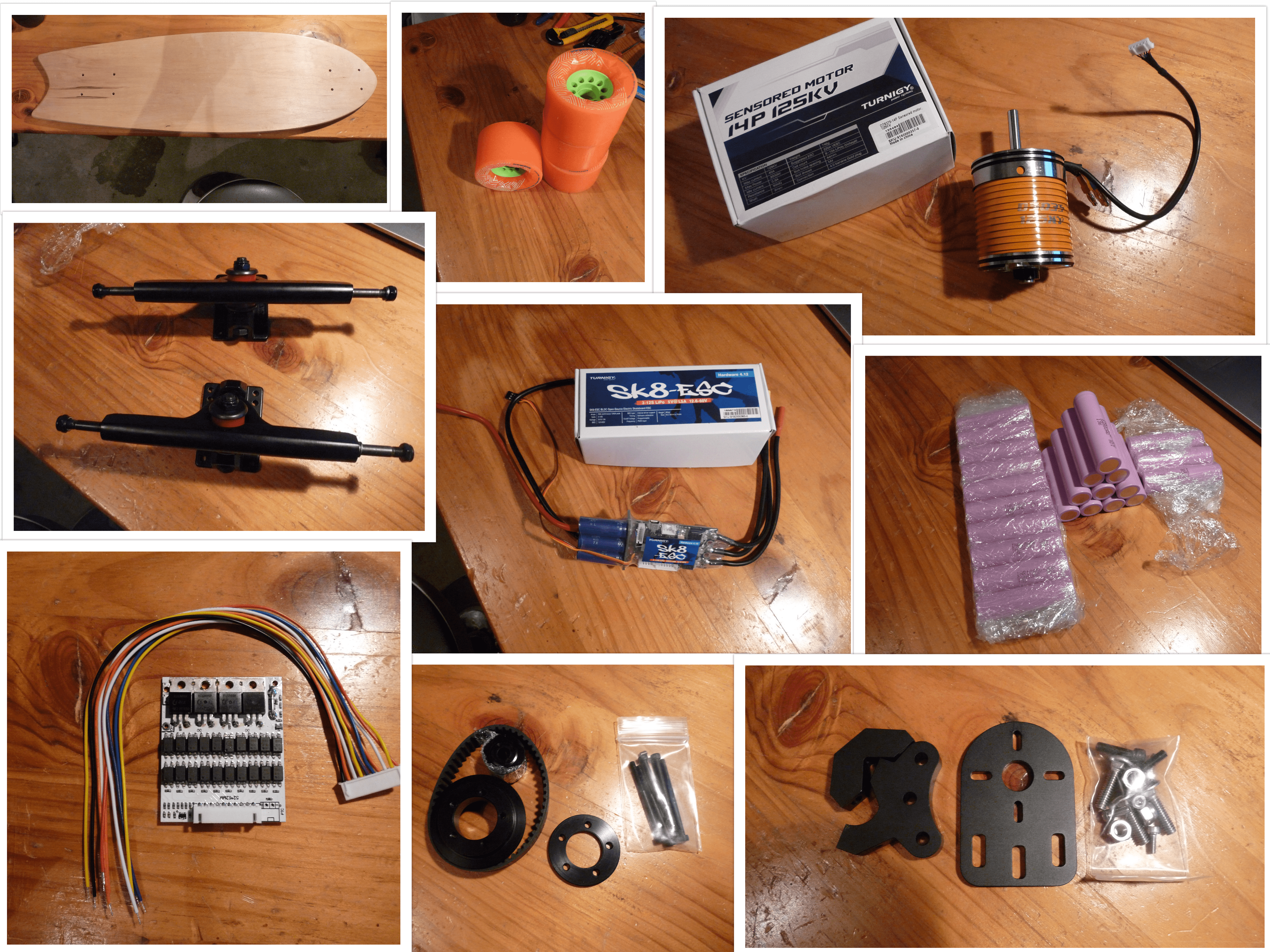
Equipment list
Turnigy D5035-125KV Sensored Brushless Motor
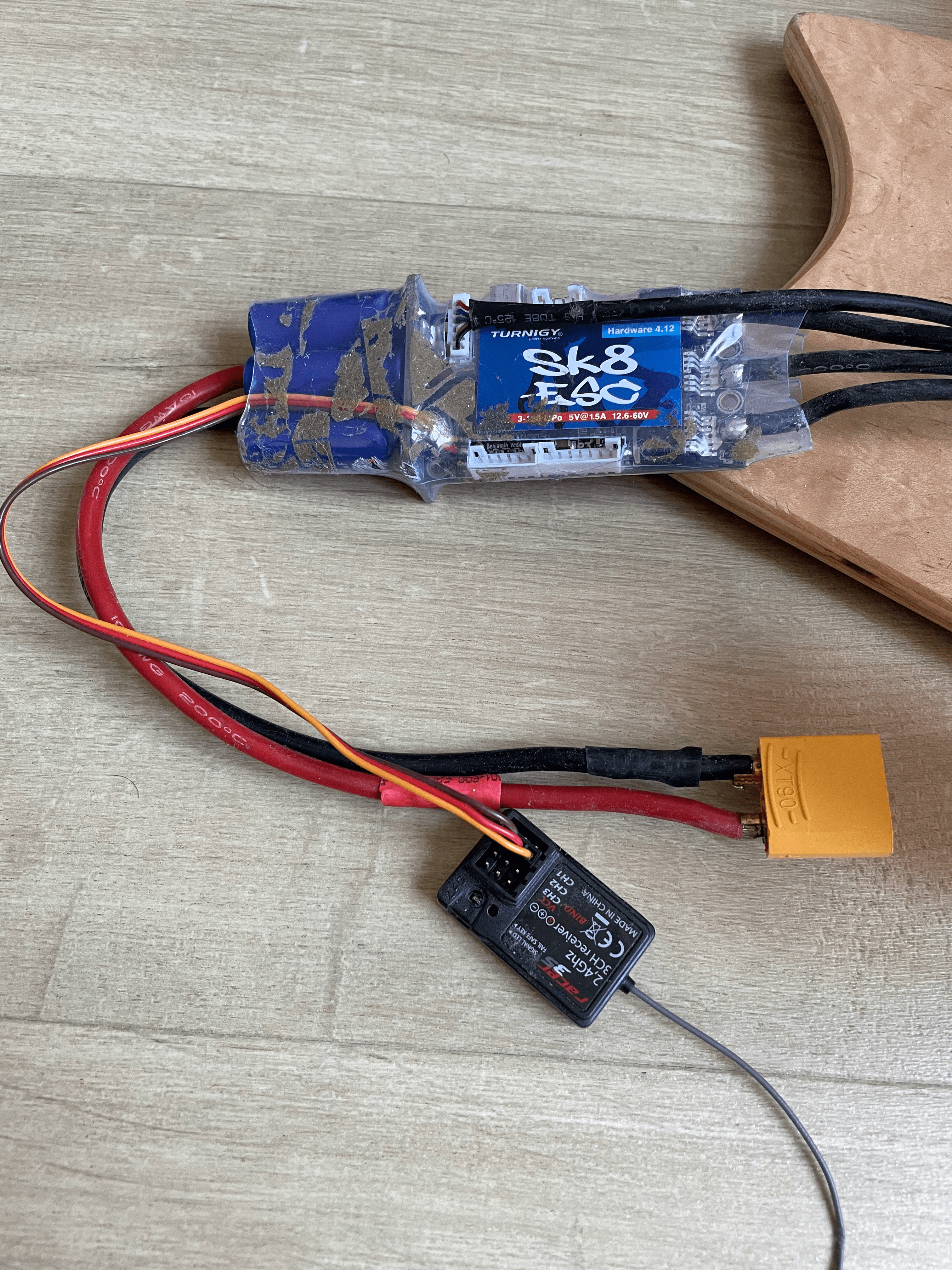
Turnigy SK8-ESC V4.12 For Electric Skateboard Conversion W/BEC
10s BMS (Battery Management System)
board deck
Abec7 bearings
spacer speed kit
1/4" Rubber Riser Pads
Orangatang Caguama Orange 80a Wheels
Premium Motor Mount from Mboards
Complete 36T Kegel Pulley System
Caliber II Trucks - Black
T2M Radio Racer 3S T4618 (temporary remote)
Nickel strip for 18650 battery 0.1x5mm 2M
5.5mm gold bullet connector for RC ESC battery motor
12 AWG 10 wire
XT-60 Connectors
heat shrink tube
18 AWG wire
XT-90 Connectors
Kapton Adhesive Tape
1 pair of XT90-S Anti Spark 4.5mm connector plugs for battery Charge ESC
42V 2A Transformer/Battery Charger
18650 Battery Isolators
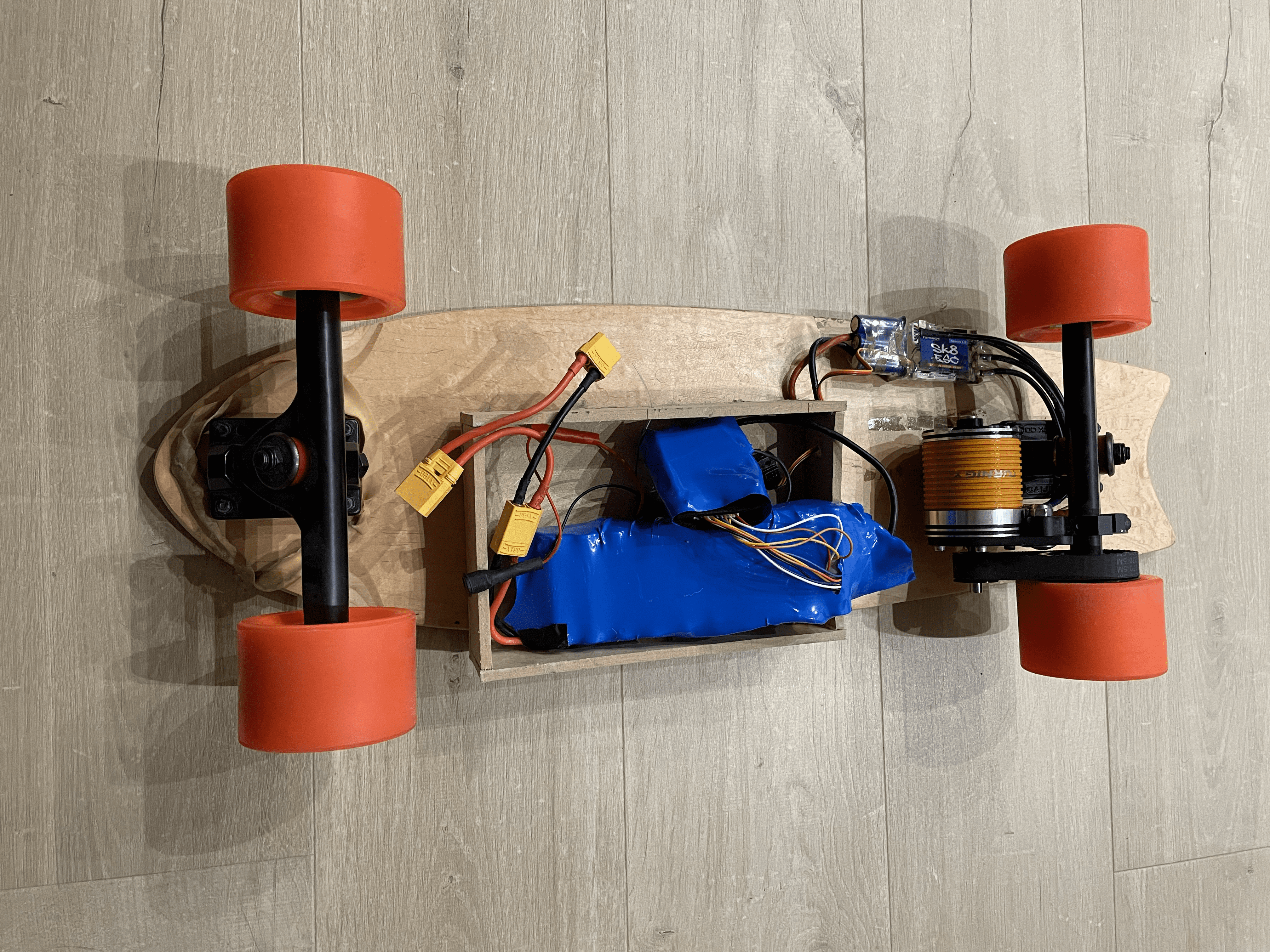
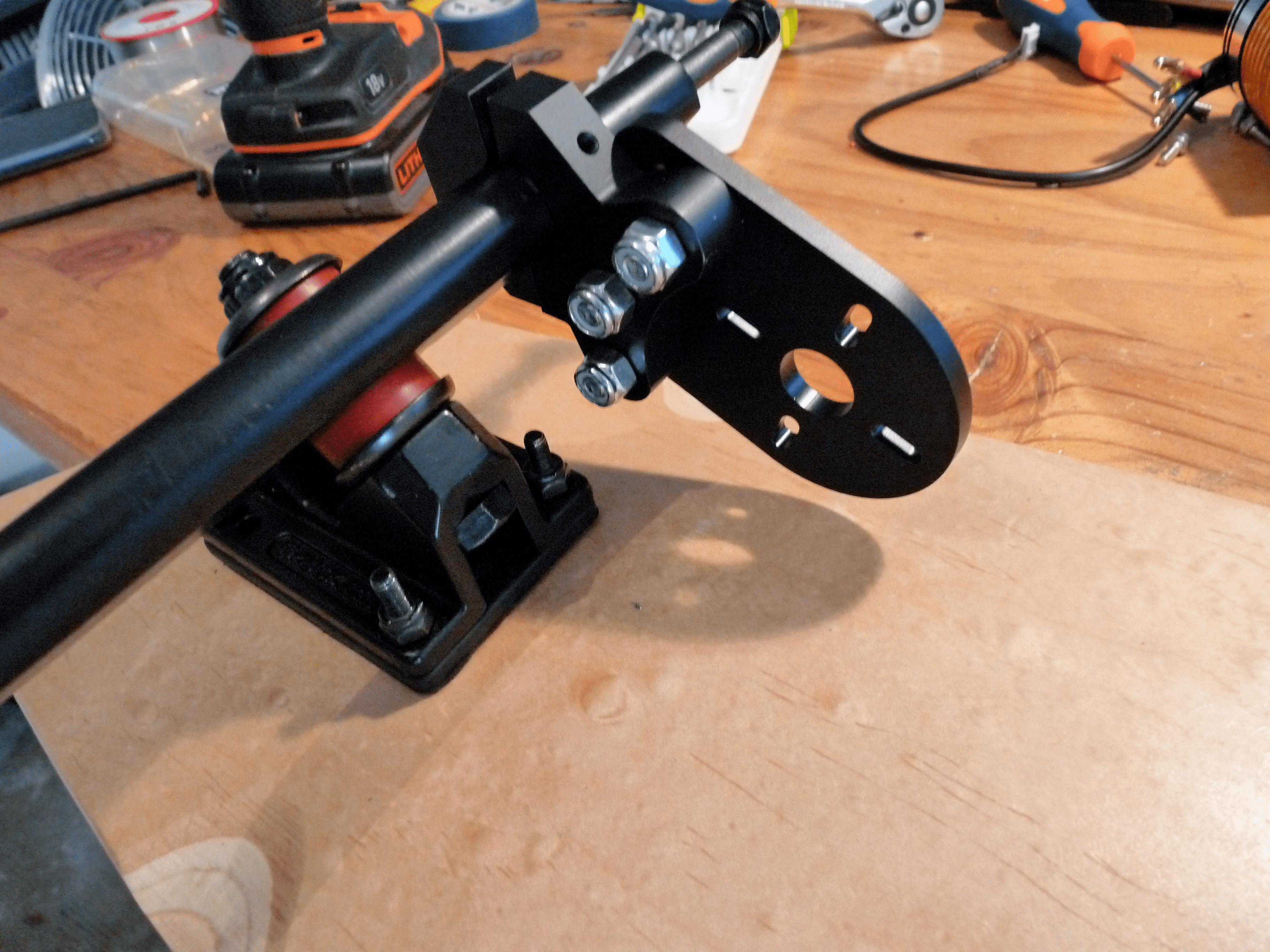
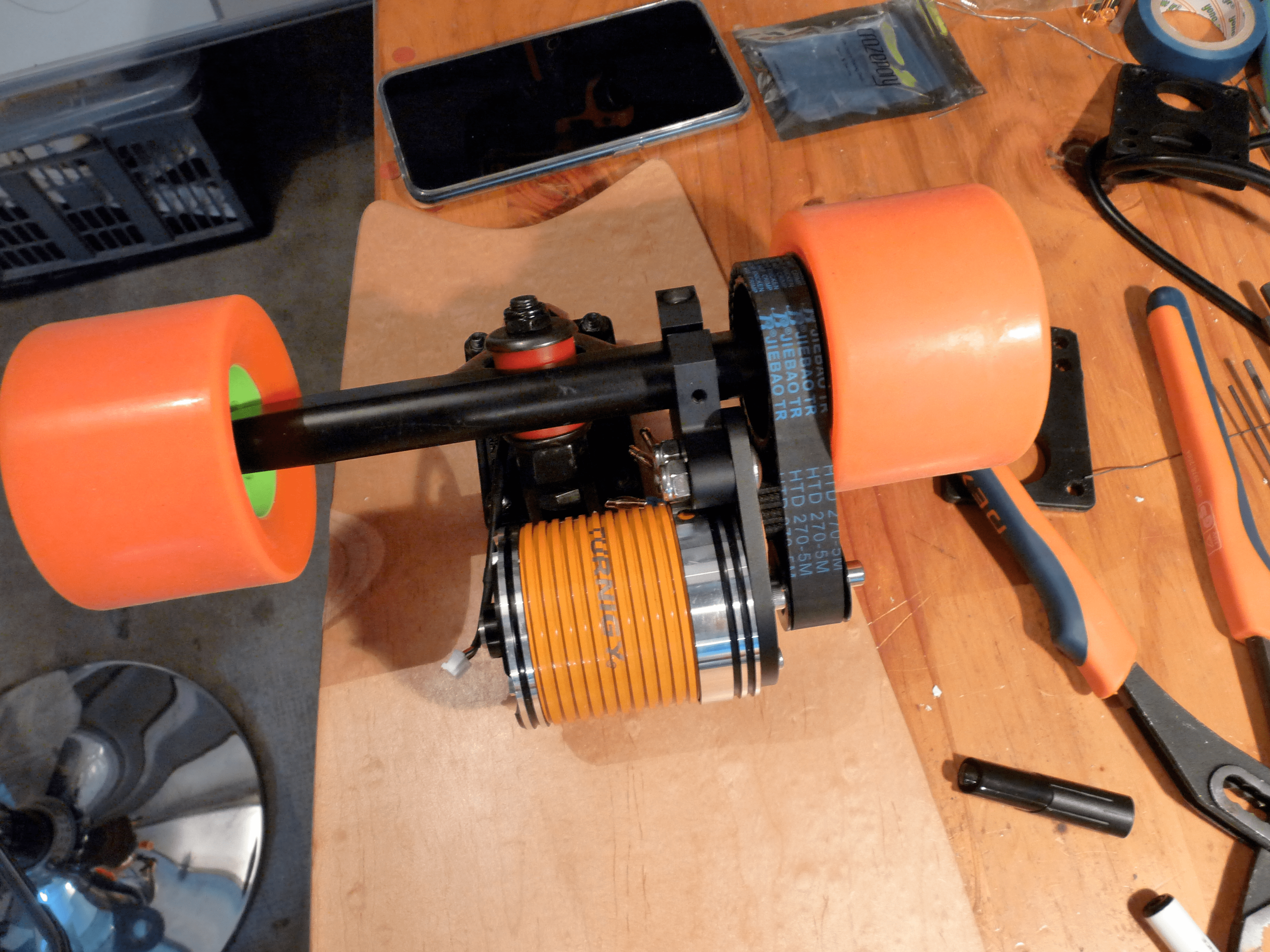
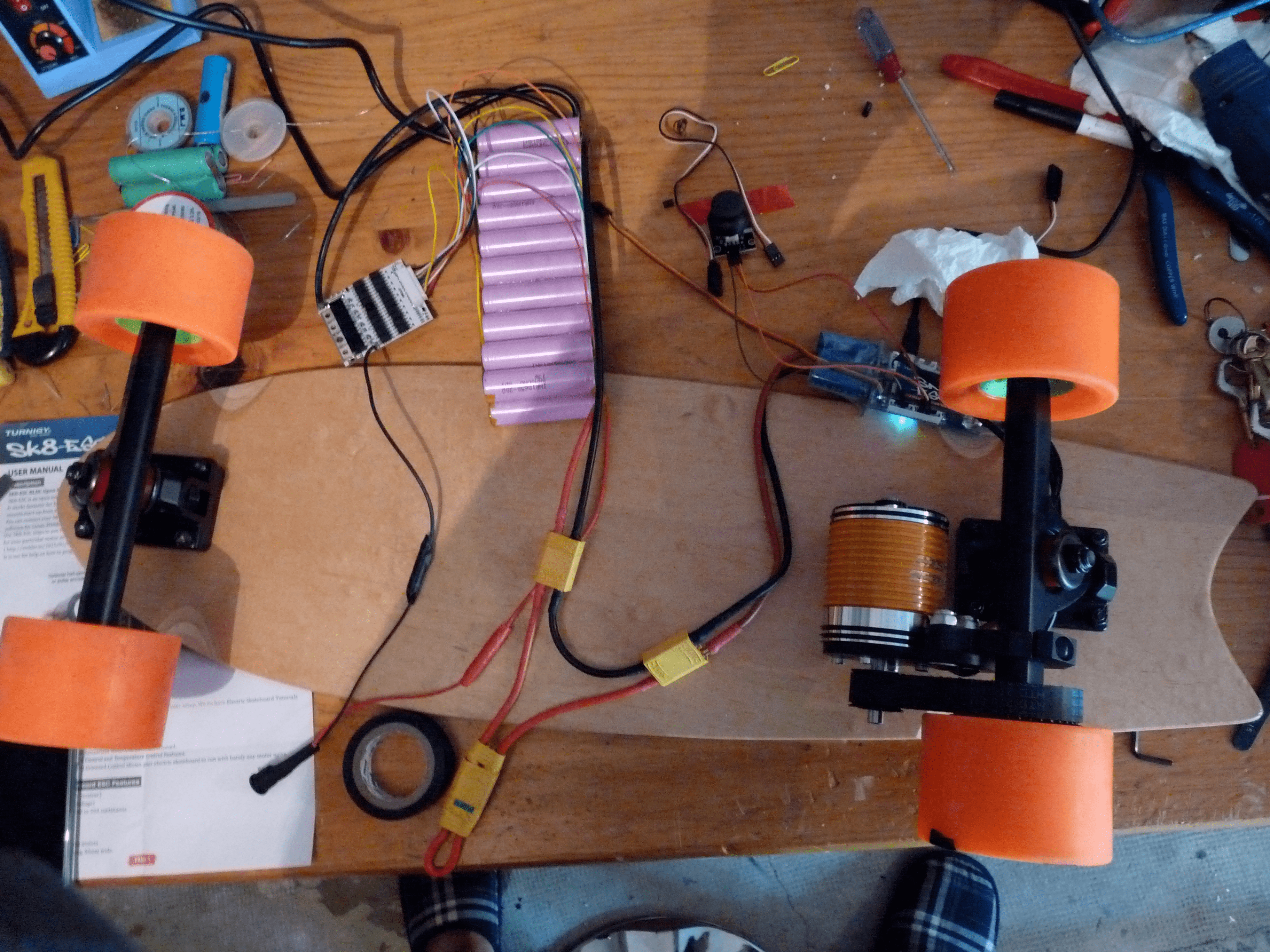
Trucks and Motor Mounting
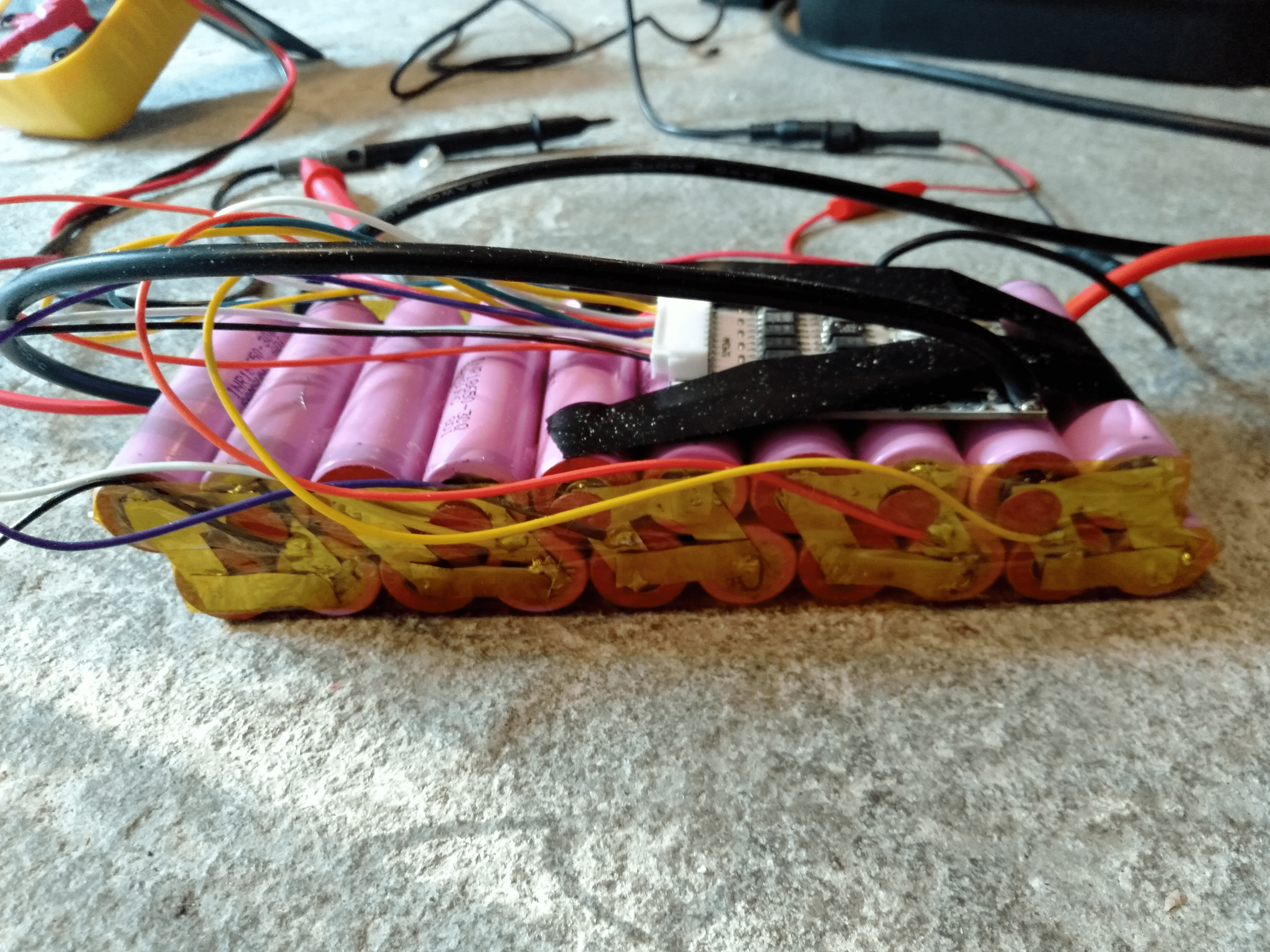
Battery manufacture and wiring the BMS
I made a video to explain the construction of the battery.
Starter Key
You have to buy a specific key type XT-90, which allows you to turn on the skate without sparking and to guarantee its security (because you keep the key with you when you are not using the skate so nobody can turn it on without you).
Temporary remote
I used a temporary remote control to control the skateboard, while waiting to build my own using a nunchuck. This remote control works in 2.4 GHz.
Wiring the VESC
VESC programming and first spin !
You need to program the VESC. There are many tutorials on the internet.
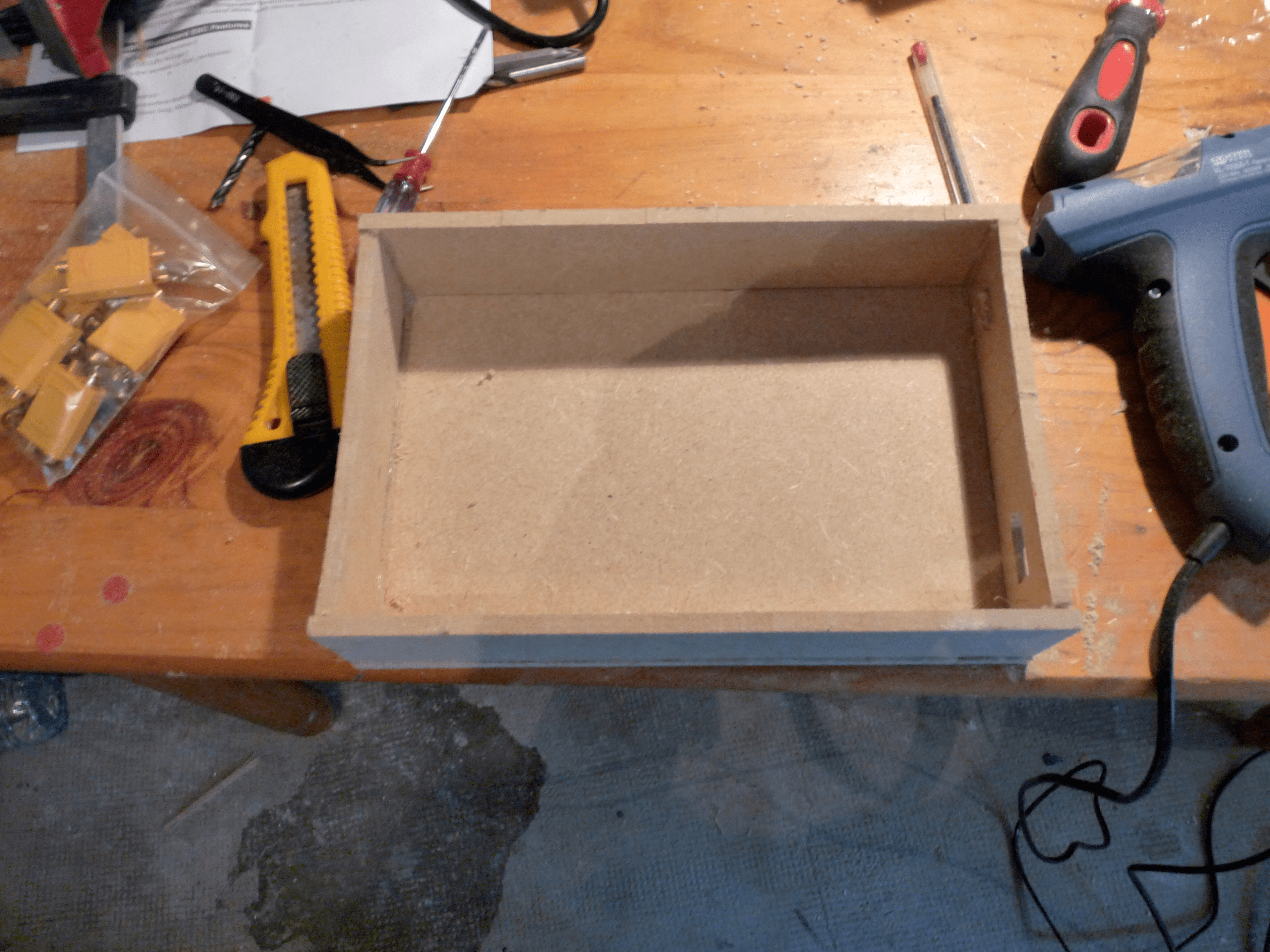
Temporary box
I built a temporary box to house the components.
Protection
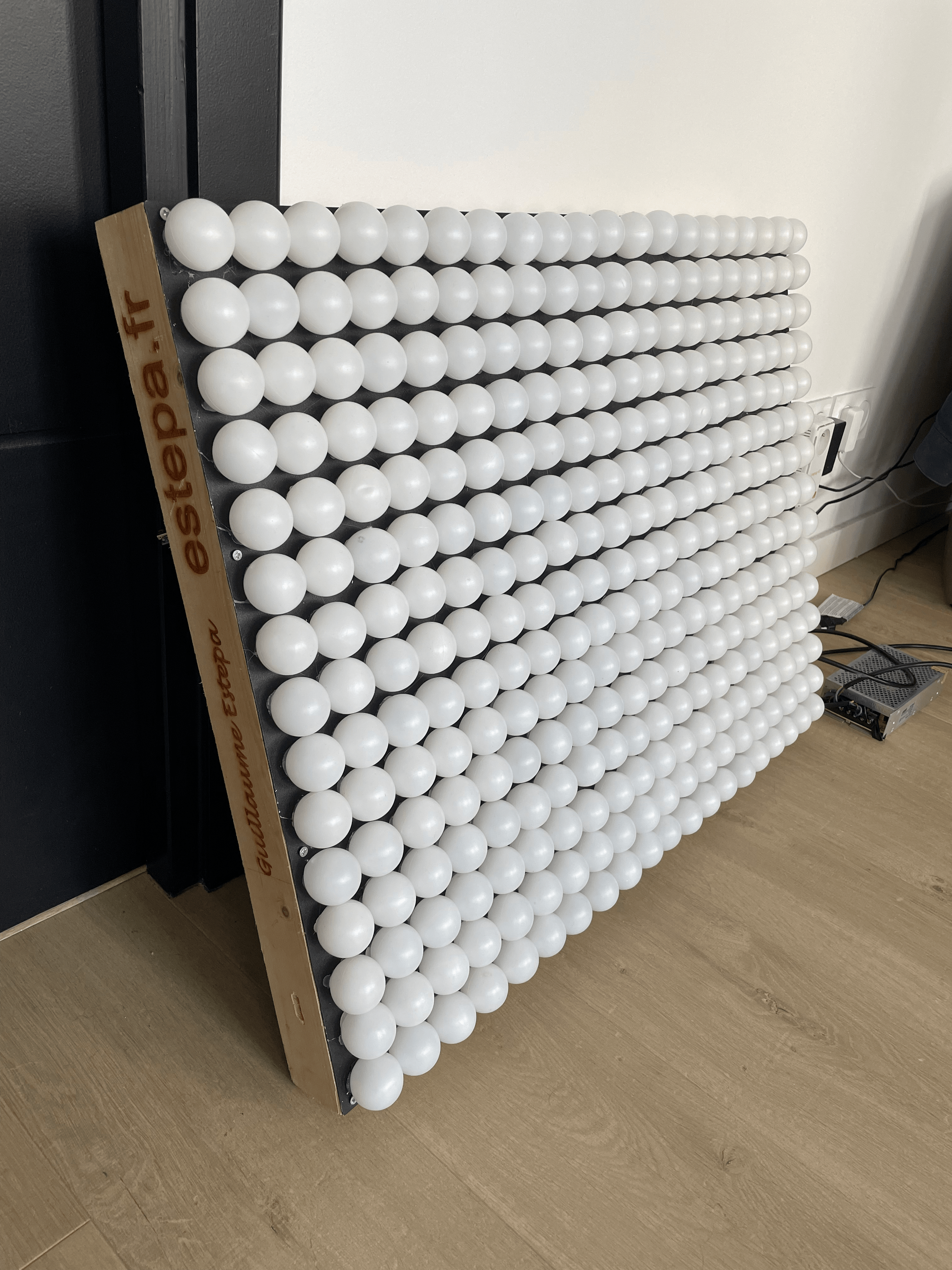
Wall of LED
Date : 2020
Dimensions : 60 x 80 cm
Equipment list
300 ping-pong balls
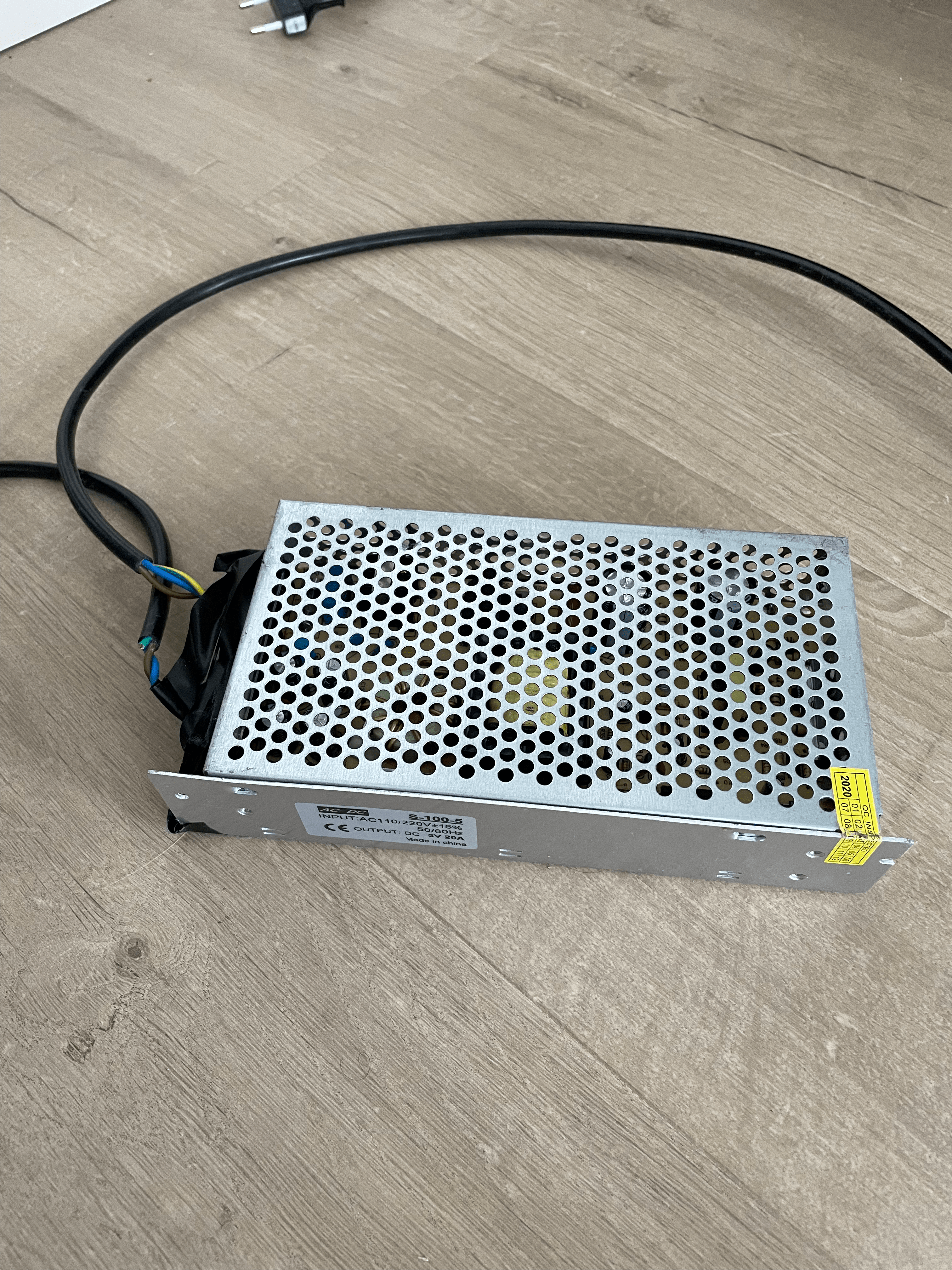
Transformer 100 W 5V 20A
6x 50 LED string ws2811
Wood
Aluminium plate
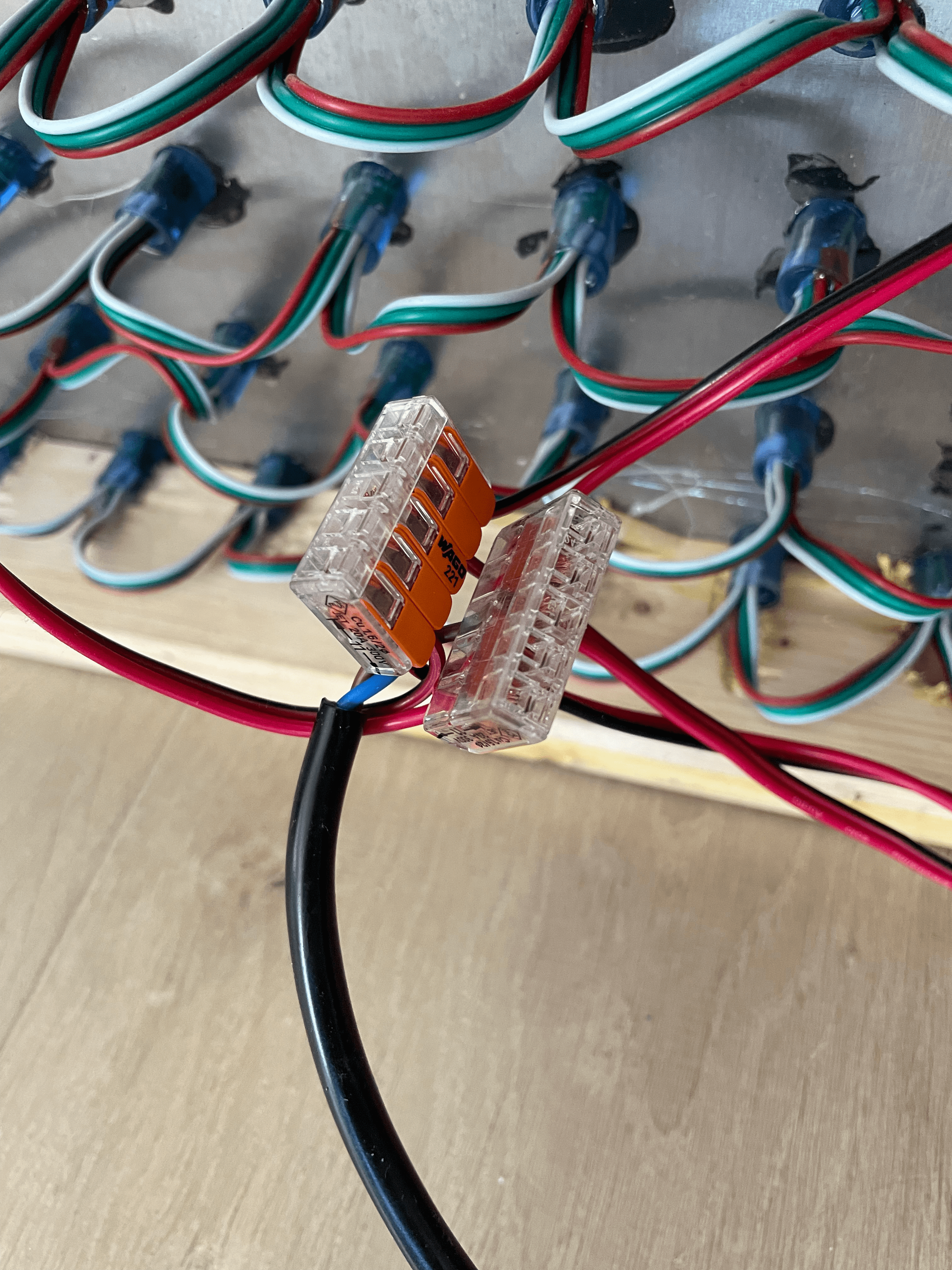
Terminal blocks for junction boxes 221 for all types of conductors (WAGO)
wires
arduino nano
Dupont type cable
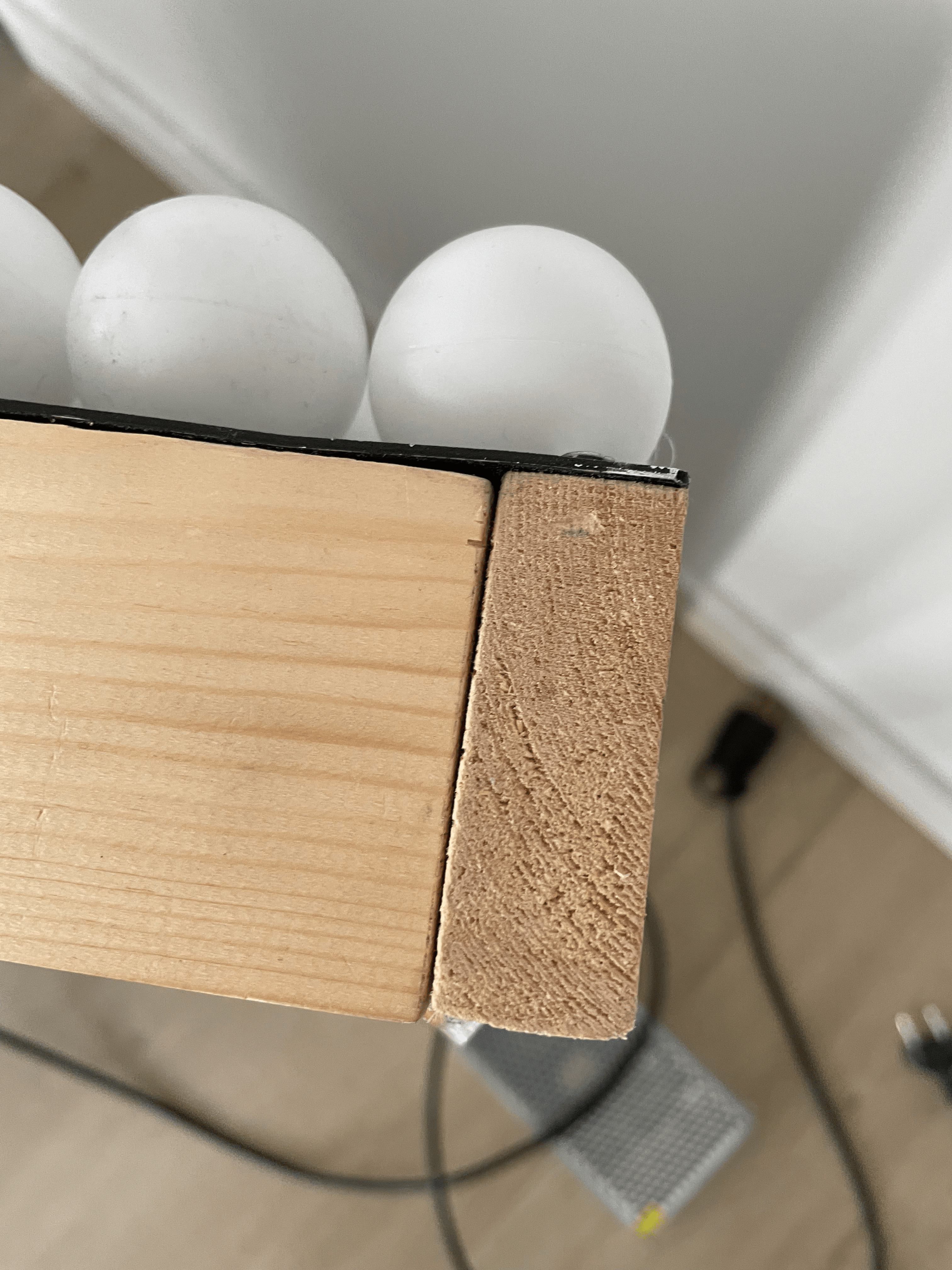
Building the frame
For the frame, I chose pieces of wood of cut 20 x 55 mm.
You can choose a smaller width than 20 mm because I had to dig into the wood to make the LEDs pass through the sides.
I assembled the pieces to make a frame.
I then cut a piece of aluminium with dimensions of 80 x 60 cm and thickness of 1.5 mm.
I highly recommend this material, although more expensive, as it is much easier to drill the holes for the LEDs.
I painted it black with metal paint to remove reflections.
You then need to drill 300 holes 12mm wide and 40mm apart.
Finally, I fixed it to the frame.
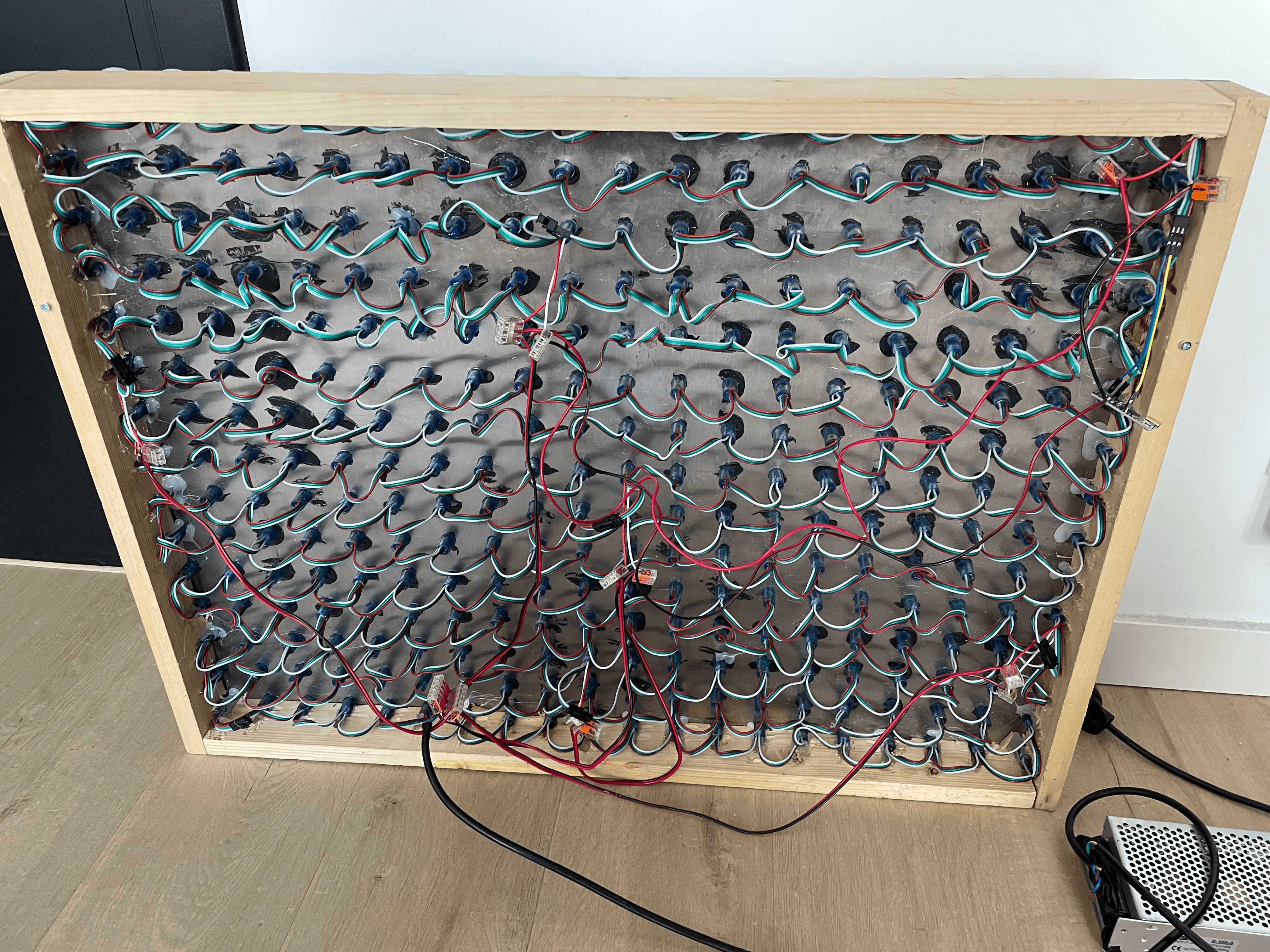
Fixing the LEDs
You must then connect the LEDs together before attaching them to the light panel.
As I explained above, I had to dig out the wood inside the frame to get the LEDs through, and this was not an easy thing to do.
You can then insert the LEDs from the top right in a zigzag pattern.
You can glue them on with hot glue if you need to.
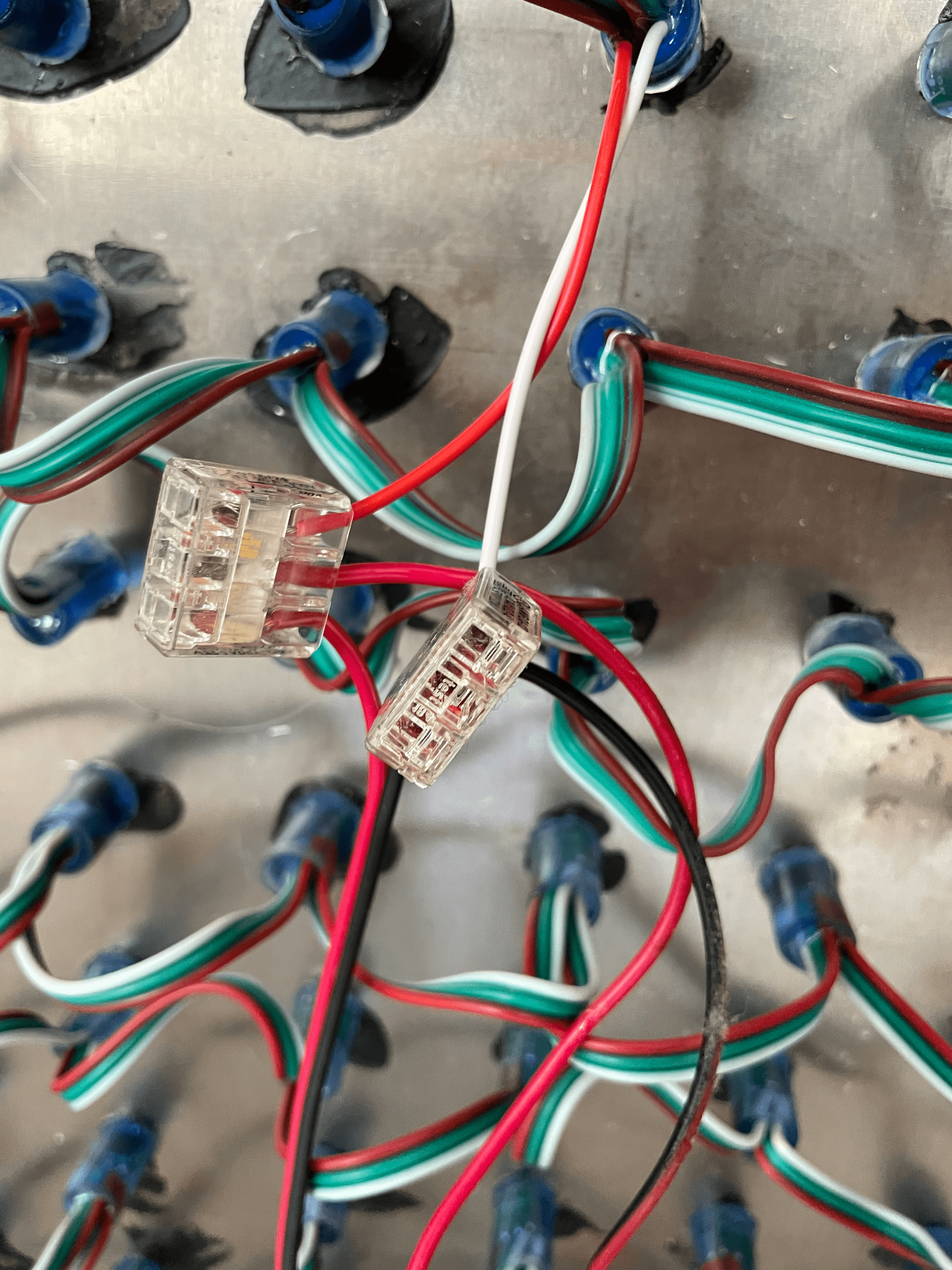
The power supply for the LEDs must be connected. The power must be well distributed, so you have to connect all the cables together.
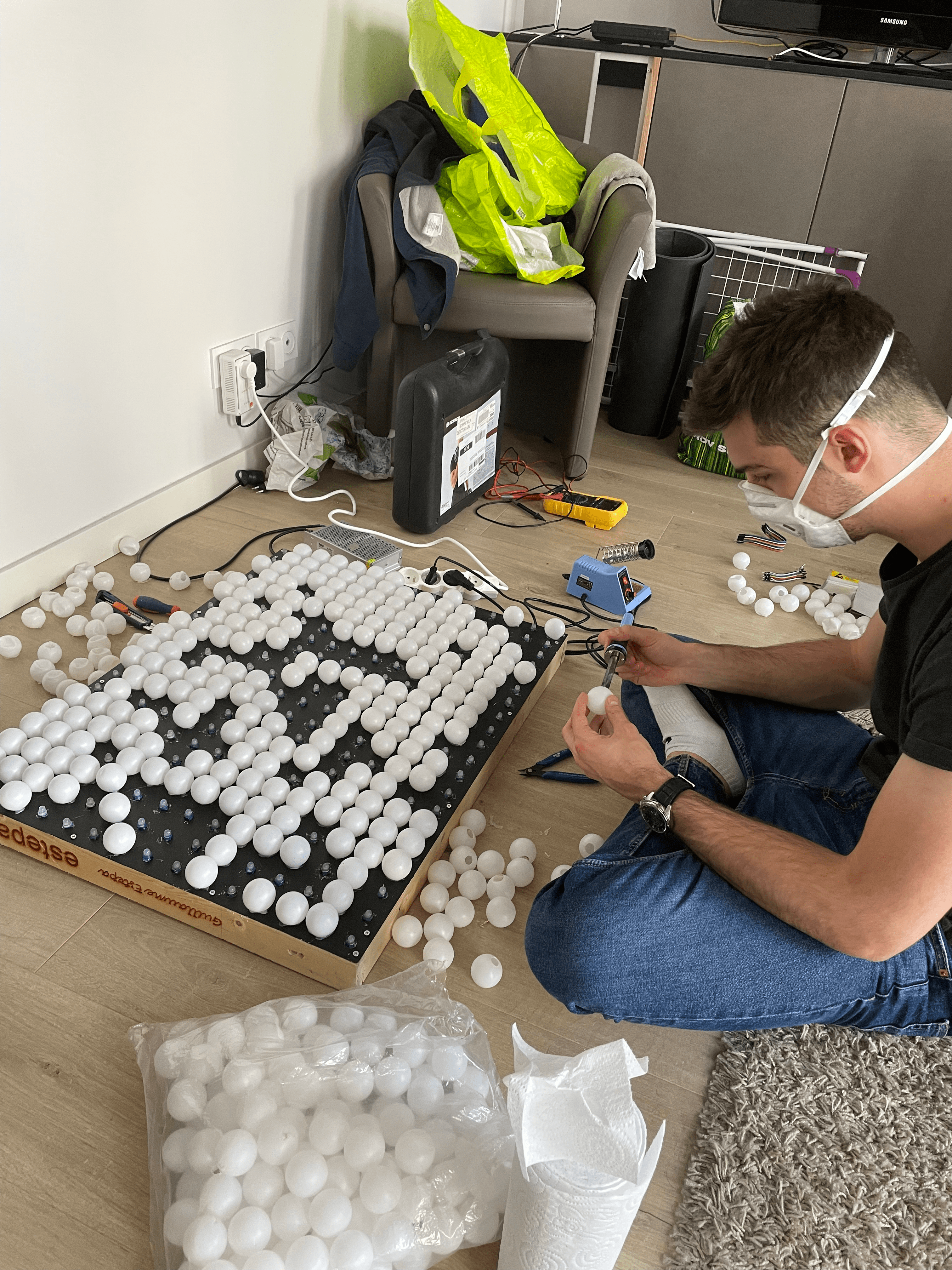
Glueing ping pong balls
Now you have to glue the ping-pong balls to the LEDs. I couldn't think of an easier way to do this than to make a hole in the balls with a soldering iron. But be careful, protect yourself because it makes a lot of toxic fumes so ventilate your working environment.
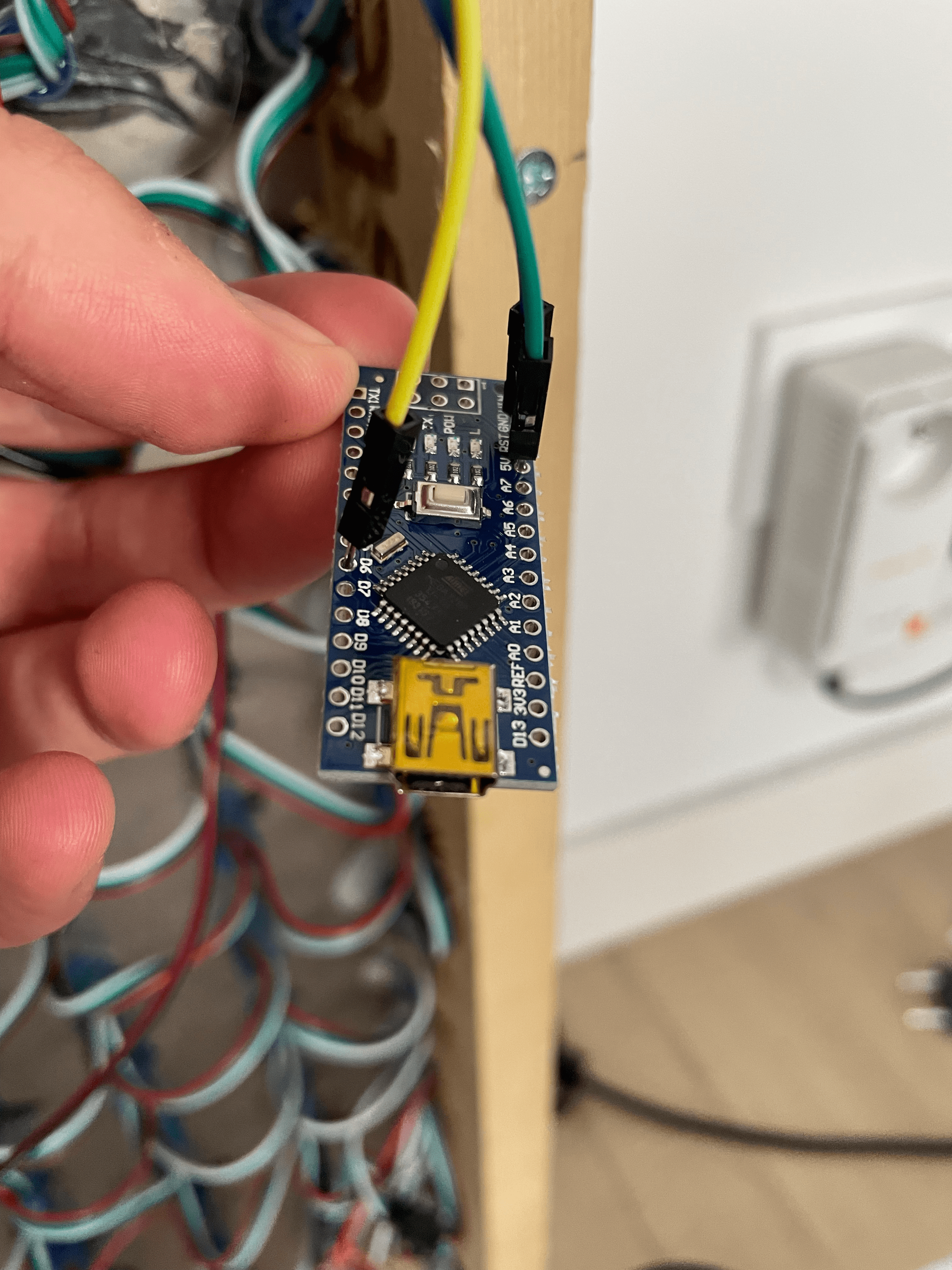
Connecting the arduino
You have to connect the arduino at the very beginning of the chain, so at the top right.
Connect the 5v to the red wire, the ground to the white wire and a digital pin of the arduino to the green wire (or the middle one).
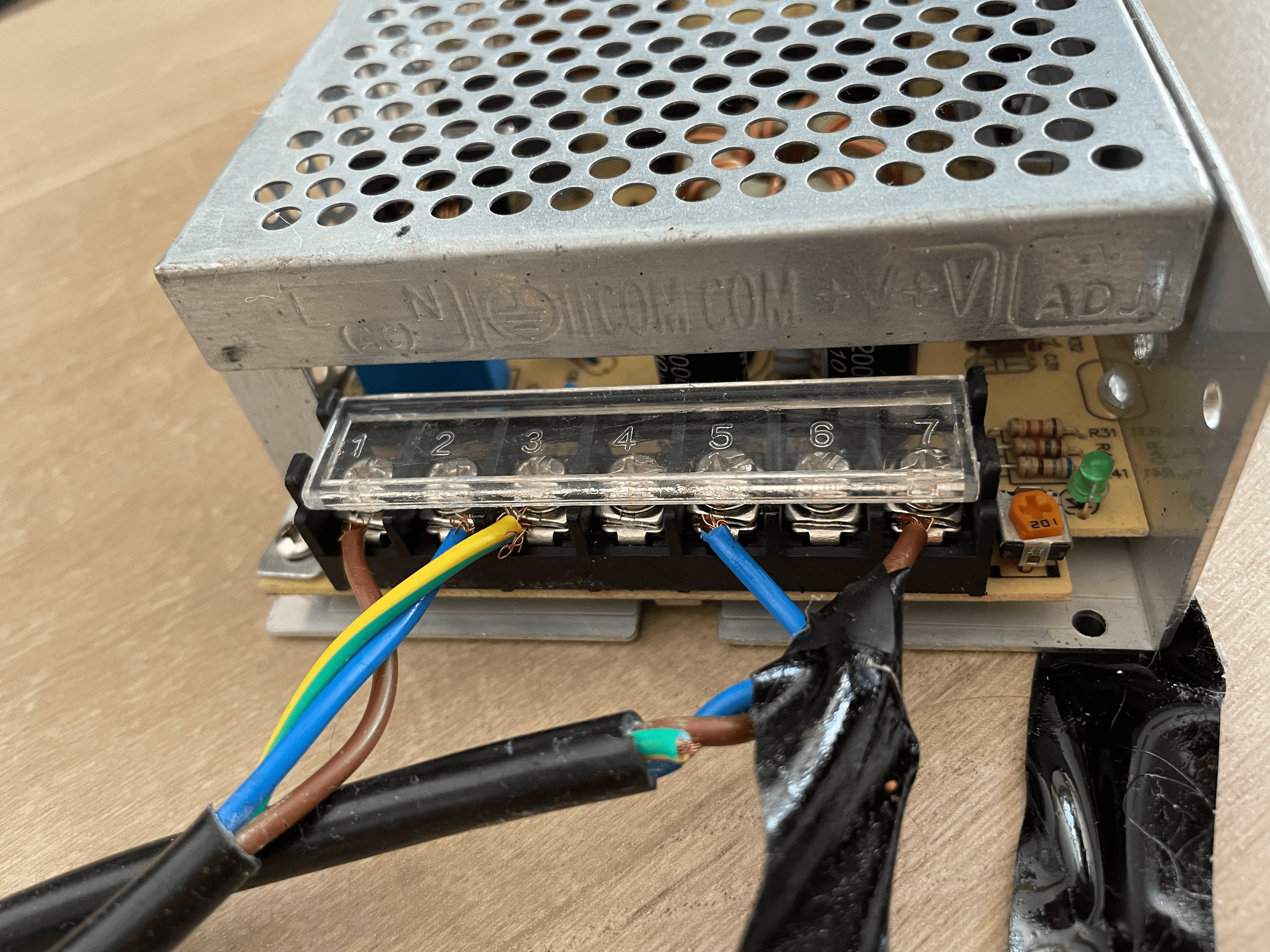
Wiring the transformer and first lighting
Finally, all that remains is to power the LEDs. For this you will need a specific power supply, delivering enough current for all the LEDs. I then tinkered with a cable to connect to a power outlet.
Check the connection as shown on the picture. The blue wire to neutral (N), the yellow and green wire to earth and the last wire (brown here) to phase (L).
At the output, you get the 5v (brown) and the ground (blue).
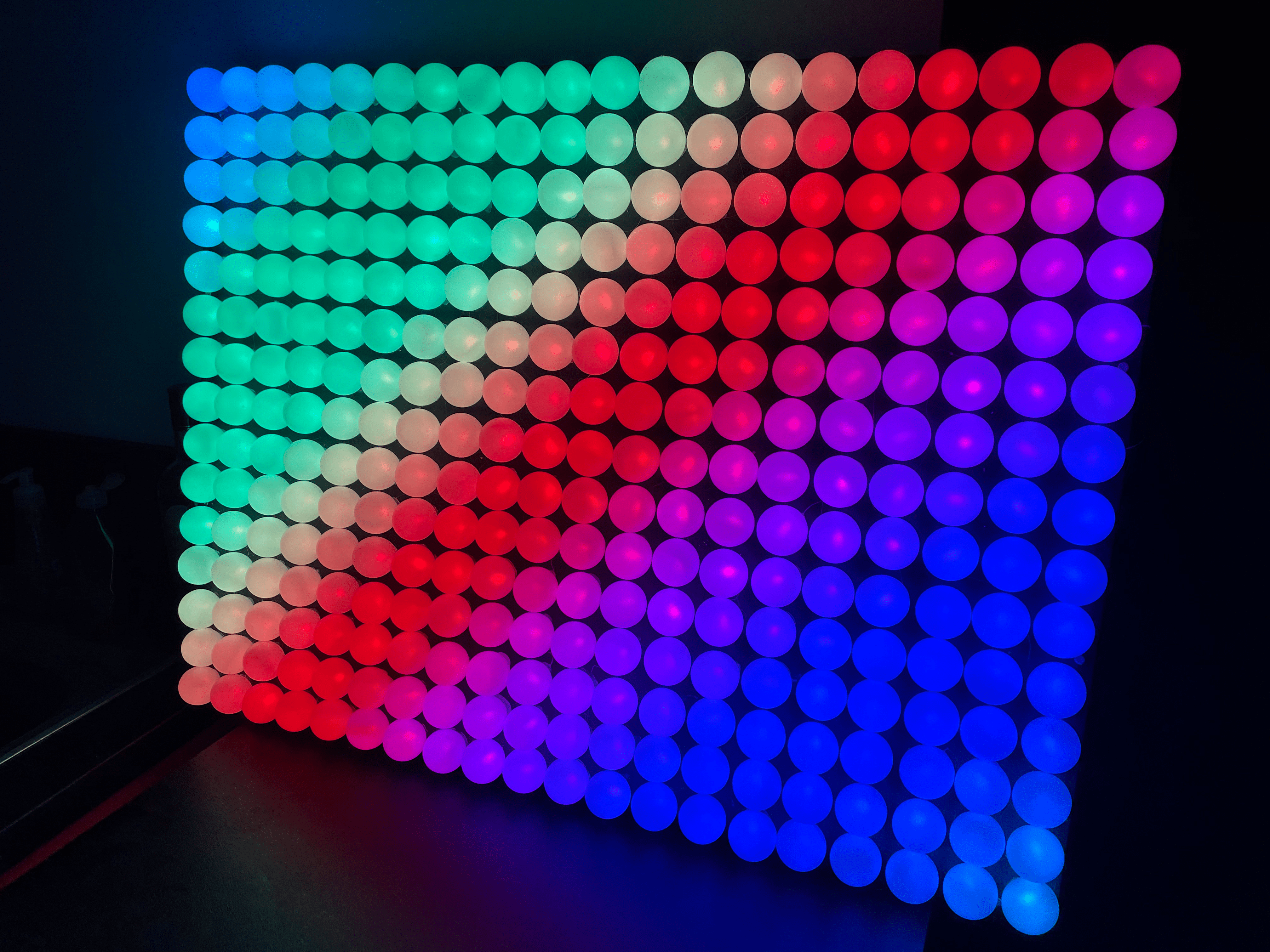
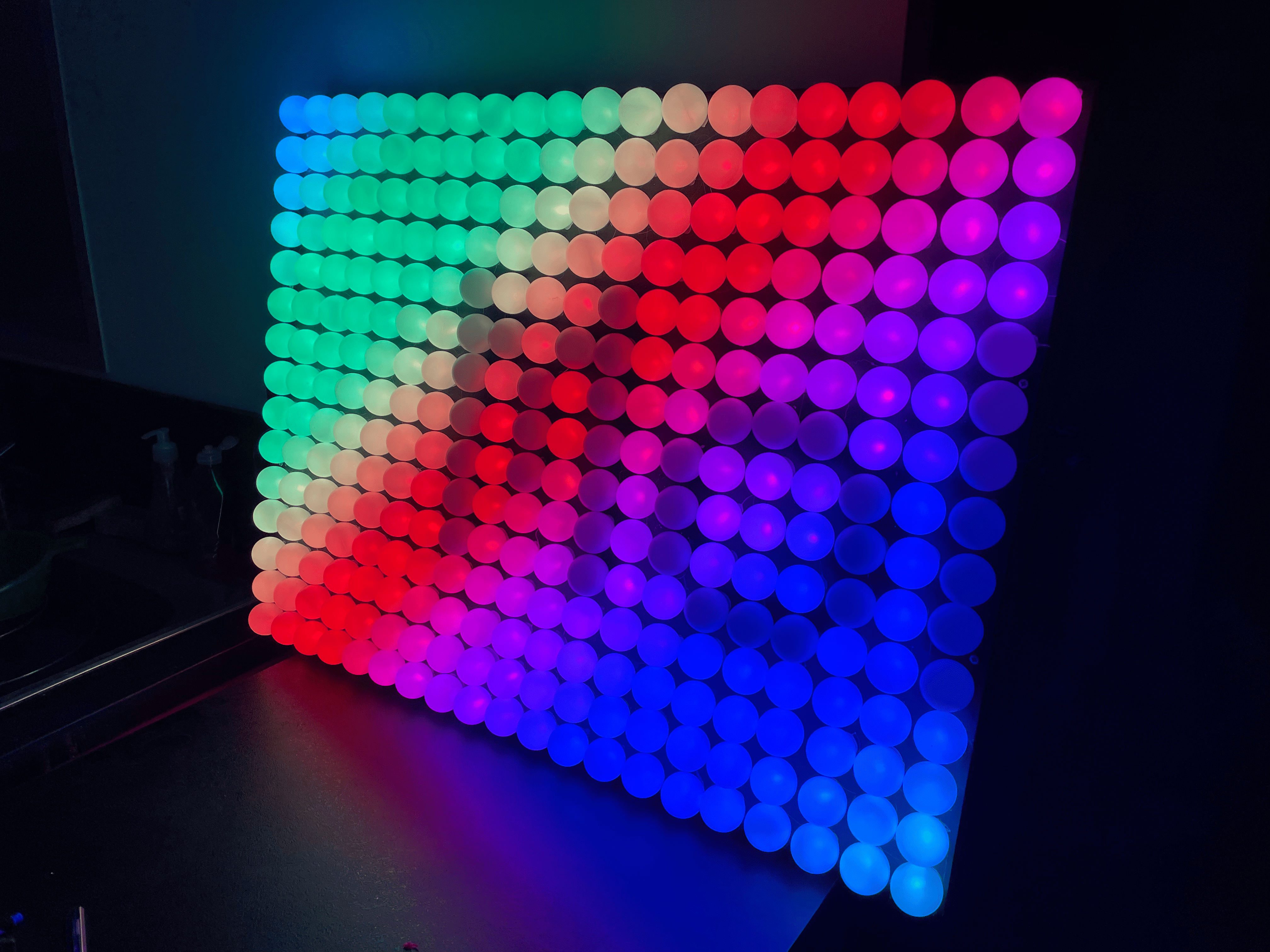
Result
You can scroll messages on the screen.
Credits
Thanks to the YouTube channel Bitluni's Lab for the idea, you can find their version, as well as their code I use on their video.
PROFILE
I'm a student at the Ecole Centrale de Lille and I'm passionate about electronics and technology. I share my creations and my experience on this website.
You can contact me for more information on one of my projects, or for information and advice on another particular project.